
Роликовый трубогибочный станок
Когда говорят 'роликовый трубогибочный станок', многие сразу представляют себе простые трехвалковые вальцы для больших радиусов. Но это, если честно, лишь верхушка айсберга, и такое упрощение иногда приводит к ошибкам при подборе оборудования. На деле, это целый класс машин, где критична не только сила проката, но и управление упругим возвратом материала, и точность позиционирования роликов. Особенно когда речь заходит о профильных трубах или тонкостенных заготовках — тут уже трехвалковой схемой часто не обойтись, нужна система с прижимным роликом или даже ЧПУ-контур для управления каждым приводом отдельно. Сам сталкивался с ситуацией, когда заказчик купил мощный, казалось бы, станок для гибки нержавеющей трубы 40х20, а на выходе получил 'гусиную шею' — не учли момент подпора и степень деформации стенки. Вот об этих нюансах, которые в каталогах часто мелким шрифтом, и хочется порассуждать.
От простого к сложному: эволюция концепции гибки
Если брать исторически, то самые первые станки были, по сути, механическими вальцами с ручной регулировкой. Гнули что могли, в основном по шаблону или 'на глаз'. Потом появились гидравлические модели — уже прогресс, сила есть, но точность все еще оставляла желать лучшего. Поворотный момент, на мой взгляд, наступил с внедрением сервоприводов и CNC-контроллеров. Внезапно оказалось, что ключ к качественному гибу — не давить сильнее, а управлять траекторией и скоростью деформации пошагово. Современный роликовый трубогибочный станок — это уже часто гибрид: силовая часть от гидравлики, а управление позицией — от сервосистем. Например, в некоторых моделях для точного гиба квадратного профиля используется несимметричная установка роликов, и вот тут без точной электроники — никуда.
Вспоминается один проект лет пять назад: нужно было гнуть алюминиевую трубу для каркасов светопрозрачных конструкций. Заказчик изначально смотрел в сторону дешевых ручных вальцов. Но после пробного гиба на таком оборудовании стало ясно — без контроля упругой деформации (springback) каждый следующий гиб будет 'уходить' на пару градусов. В итоге остановились на станке с ЧПУ и опцией автоматической компенсации этого самого springback. Да, дороже, но брак сократили практически до нуля. Это тот случай, когда экономия на оборудовании выходит боком на этапе монтажа.
Еще один момент, который часто упускают — подготовка роликов (оснастки). Для каждого типоразмера трубы, в идеале, нужен свой комплект роликов, причем с точно рассчитанным профилем канавки. Если гнуть трубу 25-мм роликом под 30-ку, на внутренней поверхности обязательно появятся заломы. У нас на производстве под каждый частый размер свой комплект лежит, а для штучных заказов — приходится либо заказывать оснастку, что долго, либо идти на компромисс с использованием универсальных, но менее точных роликов. Это всегда баланс между скоростью и качеством.
Гидравлика vs. Электромеханика: вечный спор и практический выбор
В сообществе до сих пор идут споры, что лучше для роликового трубогибочного станка — гидравлический привод или полностью электрический (сервоприводной). Гидравлика — это проверенная мощь, высокая сила проката при относительно низкой стоимости самой силовой установки. Но есть и минусы: масло, которое может течь, нагрев, шум, необходимость в обслуживании. Электромеханика — чище, тише, точнее в позиционировании, но за ту же мощность придется заплатить значительно больше. И есть ограничение по максимальному усилию.
На своем опыте скажу: для 90% задач по гибке круглой трубы до 80 мм в диаметре и профильной до 60х60 с толщиной стенки до 3-4 мм — современной электромеханики с запасом хватает. А вот если гнуть толстостенную трубу для нефтегазовых конструкций или арматуру — тут без гидравлики не обойтись. Кстати, у китайских производителей сейчас интересные гибридные решения появляются, где основные движения — от сервоприводов, а создание усилия — от компактной гидростанции. Цена/качество иногда очень даже сбалансированы.
Здесь можно упомянуть компанию ООО Нанкин Бошэнда Автоматическое Оборудование (сайт https://www.bostmachinery.ru). Они, как я понимаю, являются развитием того самого предприятия BOST, основанного еще в 1990 году в Чжуншане. Их специфика как раз в том, что они с самого начала фокусировались на разработке листогибочных и трубогибочных станков, то есть имеют длительный бэкграунд. В их линейке, если посмотреть, есть как раз и трехвалковые роликовые станки, и более сложные модели с ЧПУ. Для нашего рынка их оборудование часто рассматривают как альтернативу европейскому — не самое дешевое, но и не запредельно дорогое, при этом с хорошей базовой комплектацией. Конкретно по роликовым трубогибам у них есть серии, которые позиционируются для работы с профильной трубой, что говорит о понимании специфики деформации не круглого сечения.
Типичные ошибки при эксплуатации и 'подводные камни'
Даже с хорошим станком можно получить плохой результат, если не учитывать мелочи. Первая и главная ошибка — неправильная настройка расстояния между роликами. Если оно слишком велико — труба будет гнуться неравномерно, с образованием плоского участка в вершине гиба. Слишком мало — резко возрастает усилие, может повредиться привод или пойти 'морщина' на внутреннем радиусе. Второе — игнорирование состояния поверхности роликов. Малейшая выработка, задиры или налипший металл моментально отпечатаются на заготовке. Особенно критично для нержавейки или алюминия.
Еще один 'камень' — погоня за минимальным радиусом гибки. В технических характеристиках часто указывают предельный радиус. Но нужно понимать, что при гибке на пределе возможностей станка резко растет риск деформации сечения (овализации для круглой трубы или завала стенок у профильной). Иногда лучше сделать гиб в два-три прохода с промежуточным отжигом (если материал позволяет), чем одним заходом пытаться выжать из станка все. Сам на этом обжигался, пытаясь выполнить 'невозможный' заказ по гибке толстостенной квадратной трубы на стандартном оборудовании. В итоге — испорченная заготовка и время на переделку.
Отдельно стоит сказать про охлаждение и смазку. При интенсивной гибке, особенно металлов с высокой пластичностью, ролики и труба сильно нагреваются. Без смазки (специальной пасты для гибки) может произойти схватывание металлов, а нагрев меняет пластические свойства заготовки прямо в процессе. У нас в цеху для ответственных работ всегда стоит банка такой пасты — дешево, но эффективно предотвращает массу проблем.
Кейс: гибка перил из нержавеющей трубы — где теория сталкивается с практикой
Хочу привести пример из реальной практики, который хорошо иллюстрирует все сложности. Был заказ на серию гнутых элементов перил из трубы 38х38 мм, нержавейка AISI 304. Радиусы были разные, в том числе и довольно малые. На бумаге все просто: выставляем программу на ЧПУ, меняем ролики и вперед. Но на деле возникло две проблемы. Во-первых, та самая пружинящая деформация (springback) у нержавейки выражена очень сильно, и ее величина плавала от партии металла к партии, видимо, из-за разницы в термообработке у поставщика. Пришлось для каждой новой бухты делать тестовый гиб и корректировать программу.
Во-вторых, на малых радиусах на внутренней поверхности гиба (в месте контакта с роликом) появлялись микротрещины — так называемое 'растрескивание'. Причина — превышение предельной степени деформации для данного сортамента. Решение оказалось не в увеличении силы, а наоборот: мы снизили скорость гибки и сделали ее в два этапа с небольшим промежуточным прогревом строительным феном (не до красна, конечно, но чтобы снять внутренние напряжения). Это не по учебнику, но сработало. Идеальный роликовый трубогибочный станок для такой задачи должен был бы иметь функцию контроля температуры или возможность гибки с подогревом, но такое оборудование — редкость и стоит космических денег.
В этом проекте мы в итоге использовали станок с ЧПУ, но не самой последней модели. Его программное обеспечение позволяло вносить поправочные коэффициенты на springback, но делалось это вручную, эмпирически. Современные системы, как я знаю, уже умеют автоматически измерять угол после гиба датчиком и вносить коррективы в реальном времени. Вот к чему стоит стремиться, если объемы подобных работ постоянные.
Будущее и нишевые решения
Куда движется разработка роликовых трубогибов? На мой взгляд, тренд — это интеграция. Станок перестает быть изолированной единицей. Он все чаще является частью автоматической линии, куда труба подается от разматывателя, проходит через систему правки, затем гибку, а потом резку и снятие. Управление — единое. В таком контуре требования к точности и повторяемости гиба на порядок выше.
Еще один интересный момент — гибка по 3D-модели. Сейчас уже не редкость, когда оператор загружает в контроллер станка 3D-модель детали, а система сама рассчитывает последовательность гибов, углы, смещения. Для этого, правда, нужен не просто трехвалковый станок, а более сложная кинематическая схема, часто с дополнительными степенями свободы. Такие машины, конечно, на вес золота.
Что касается нишевых решений, то вижу потенциал в станках для гибки тонкостенных труб из цветных металлов, используемых в мебели или декоративных элементах. Там требования к сохранению зеркальной поверхности и отсутствию малейших следов от роликов — наивысшие. Для этого нужны ролики с полированной поверхностью, возможно, с покрытием, и исключительно плавное, без рывков, движение. Иногда проще и дешевле для таких задач использовать не классический роликовый трубогибочный станок, а станок с гибкой по технологии 'rotary draw bending' (вытяжная гибка с дорном), но это уже совсем другая история и другой класс оборудования.
Вернусь к началу. Выбор и работа с роликовым трубогибочным станком — это всегда поиск компромисса между силой, точностью, скоростью и стоимостью. Готовых решений нет. Нужно глубоко понимать, что именно ты собираешься гнуть, в каких объемах и с каким допуском. И тогда даже не самый новый или навороченный станок сможет выдавать отличный результат в умелых руках. Главное — не воспринимать его как простой инструмент для 'кручения труб', а видеть в нем сложную систему, где материал, оснастка, привод и управление работают в связке.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
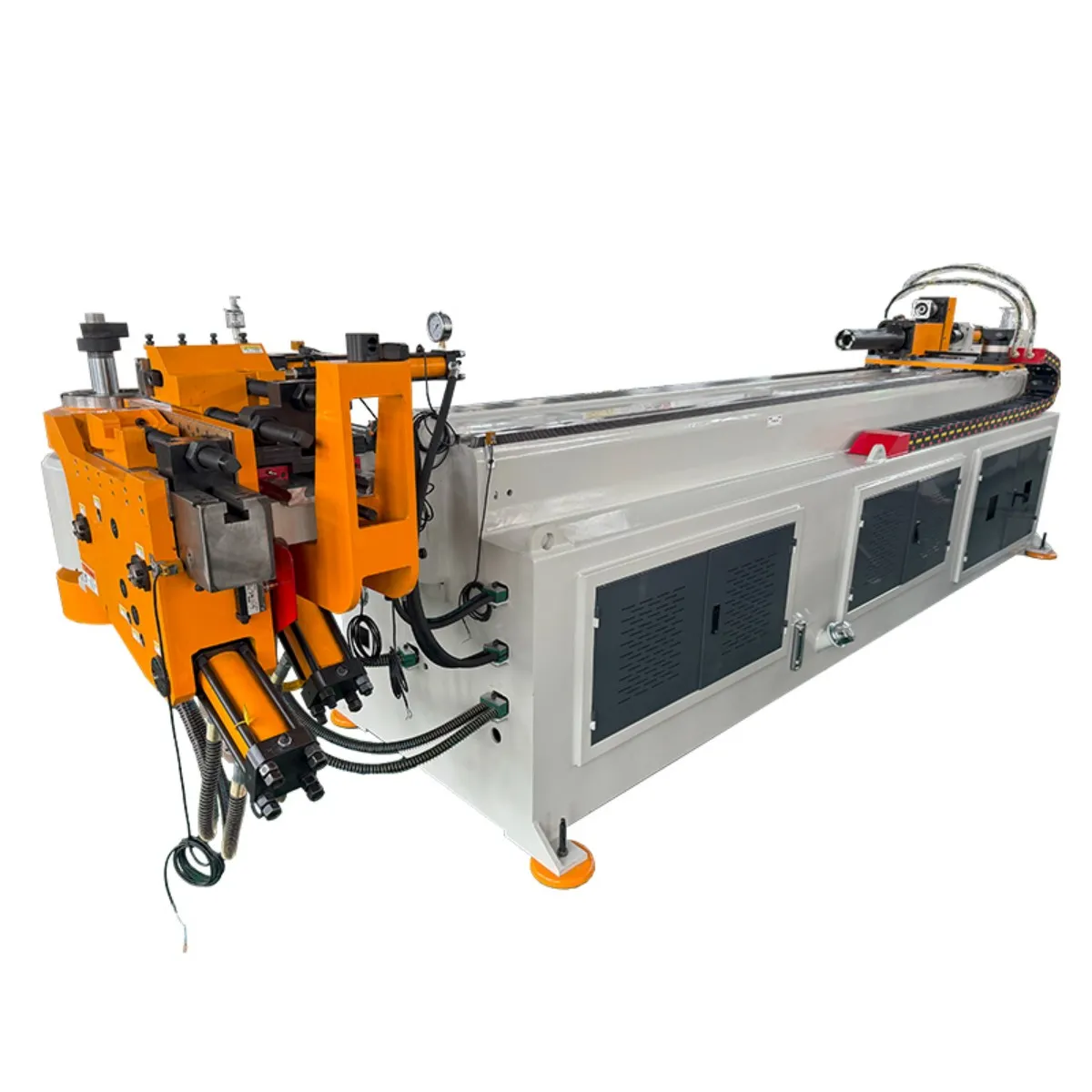 Трубогибочный станок
Трубогибочный станок -
 Система компенсации прогиба
Система компенсации прогиба -
 Гибочный автомат для трубных профилей с НУ
Гибочный автомат для трубных профилей с НУ -
 Вальцы гидравлические четырехвалковые W12
Вальцы гидравлические четырехвалковые W12 -
 Модификация заднего упора
Модификация заднего упора -
 Поддерживающие упоры-копиры
Поддерживающие упоры-копиры -
 Лазерная резка листа
Лазерная резка листа -
 Гидравлический чугунолитейный станок серии Q35Y
Гидравлический чугунолитейный станок серии Q35Y -
 Высокопроизводительный автоматический станок для гибки стальных U-образных
Высокопроизводительный автоматический станок для гибки стальных U-образных -
 Система крепления оснастки
Система крепления оснастки -
 Лазерная резка труб
Лазерная резка труб -
 Скоростной отрезной электронный ленточнопильный станок для резки металла и труб
Скоростной отрезной электронный ленточнопильный станок для резки металла и труб
Связанный поиск
Связанный поиск- Трубный волоконно-лазерный режущий станок
- Экономичный гибочный пресс с ЧПУ
- Шкивы для трубогибочного оборудования
- Четырехвалковый вальцовочный станок с ЧПУ для листового металла
- Лазерное режущее оборудование
- Малый пресс для гибки
- Цена волоконного лазерного режущего станка мощностью 3 кВт
- Лазерный режущий станок мощностью 6000 Вт
- Небольшой лазерный режущий станок
- Штампы для гибочного пресса













